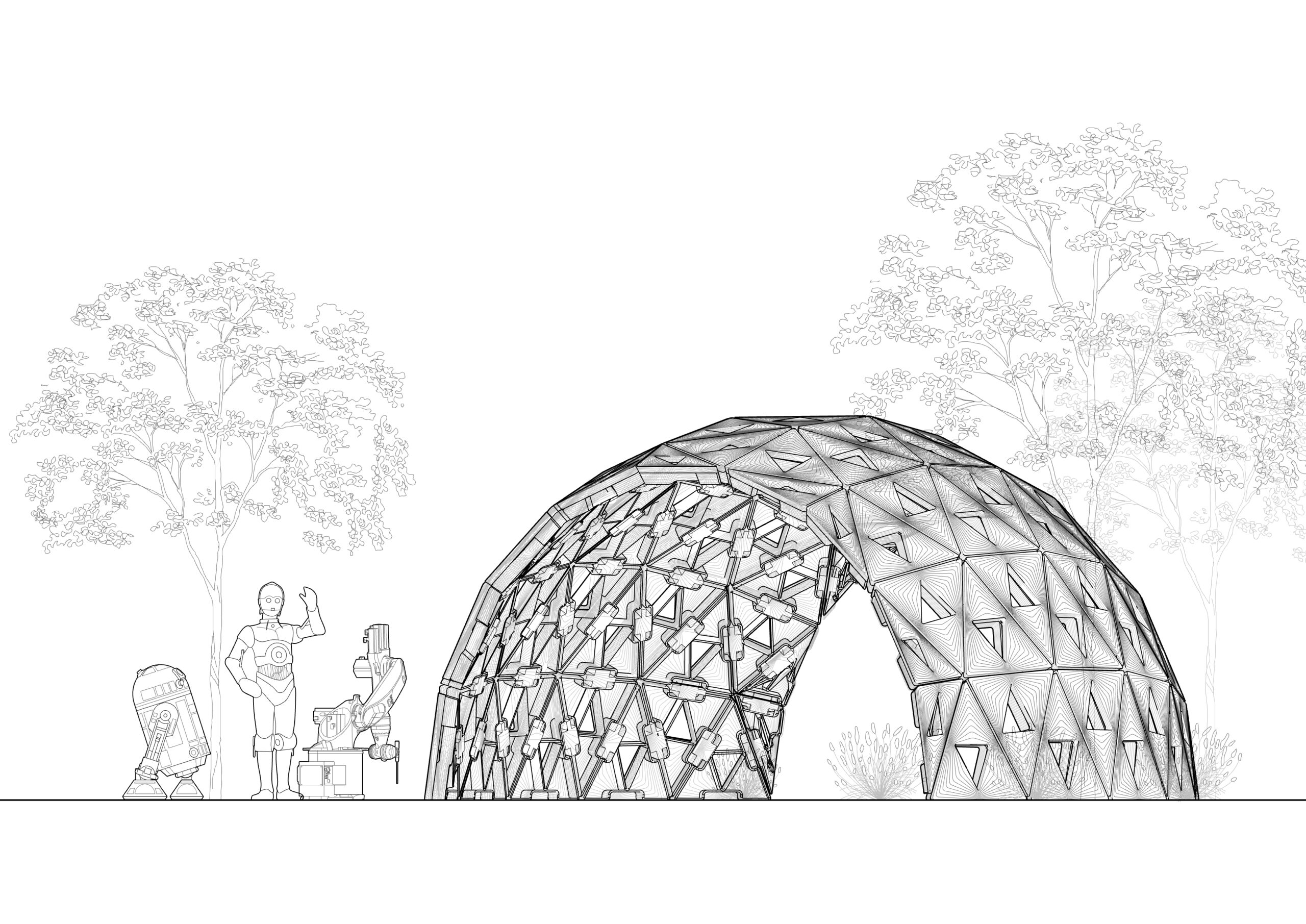
An investigation into automated printing and assembly
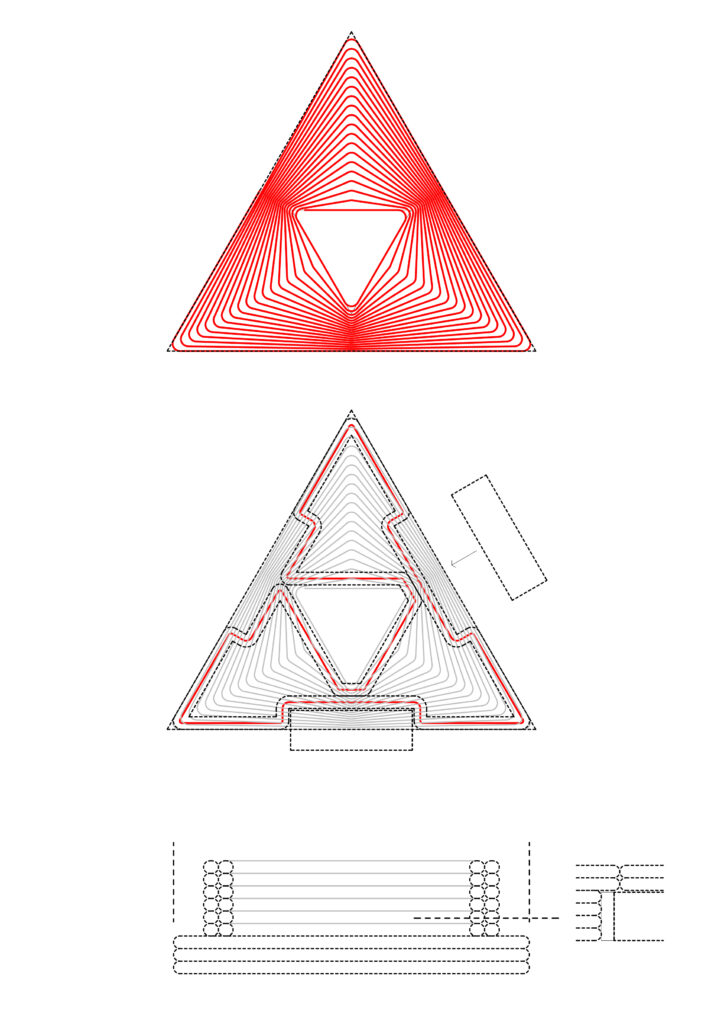
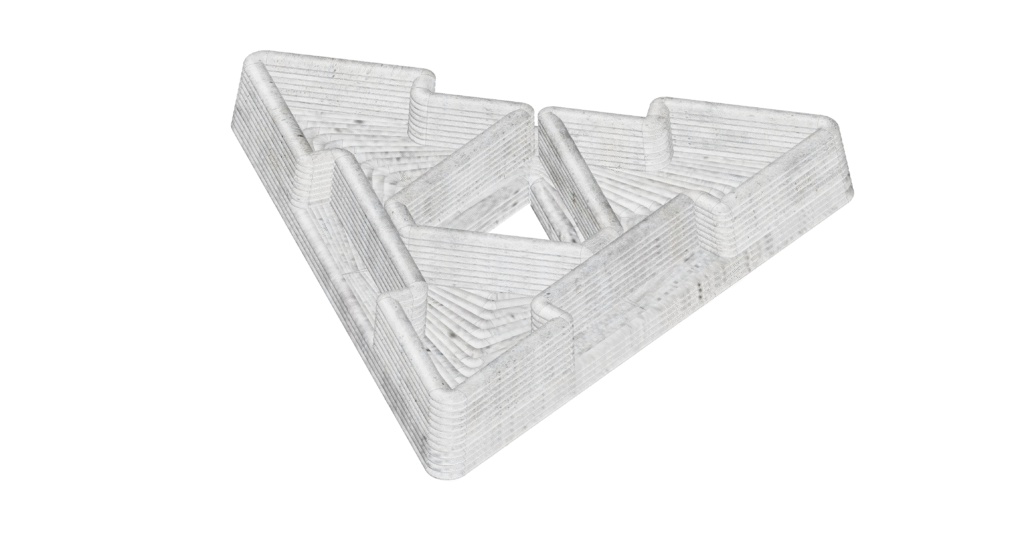
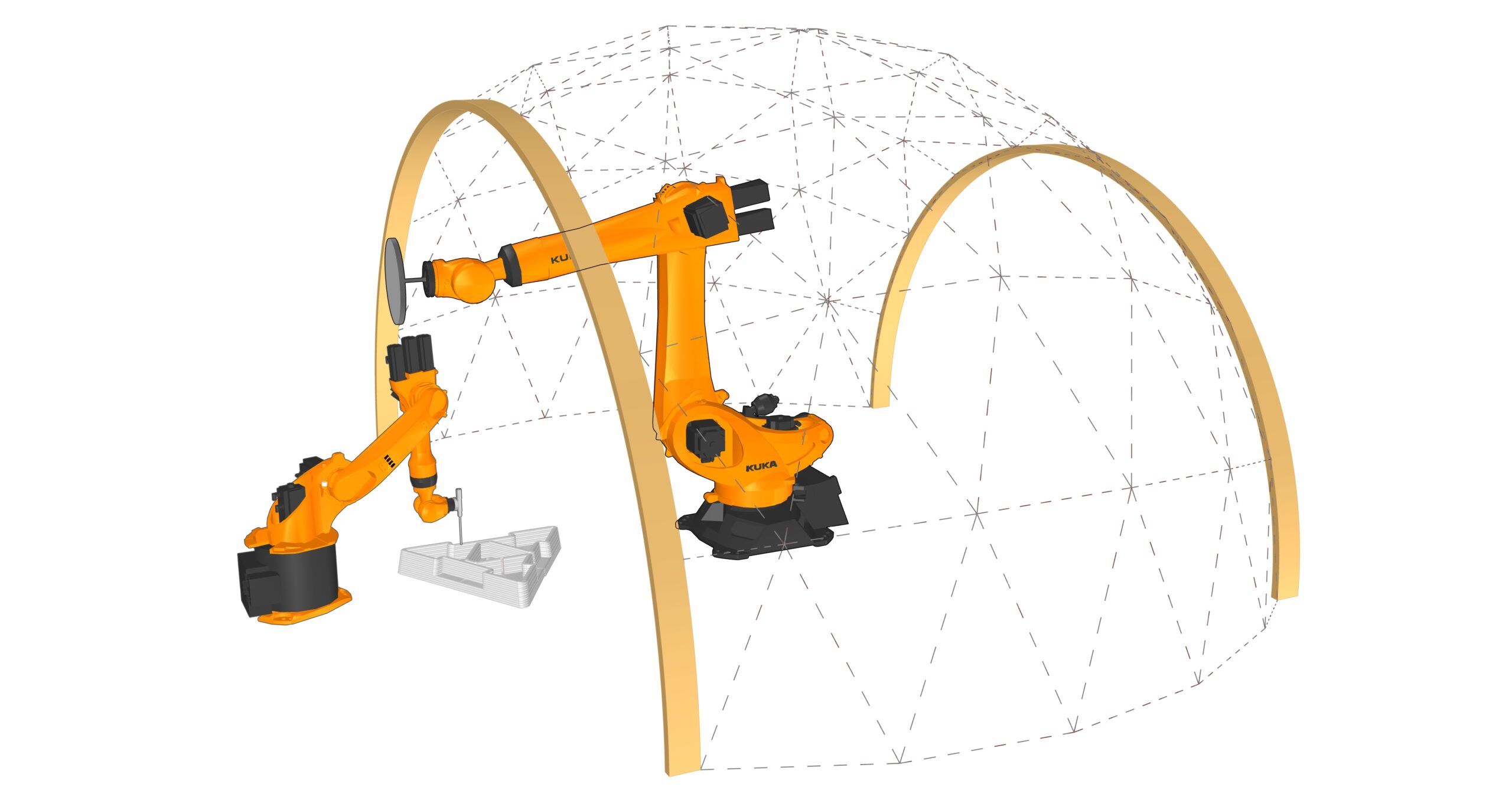
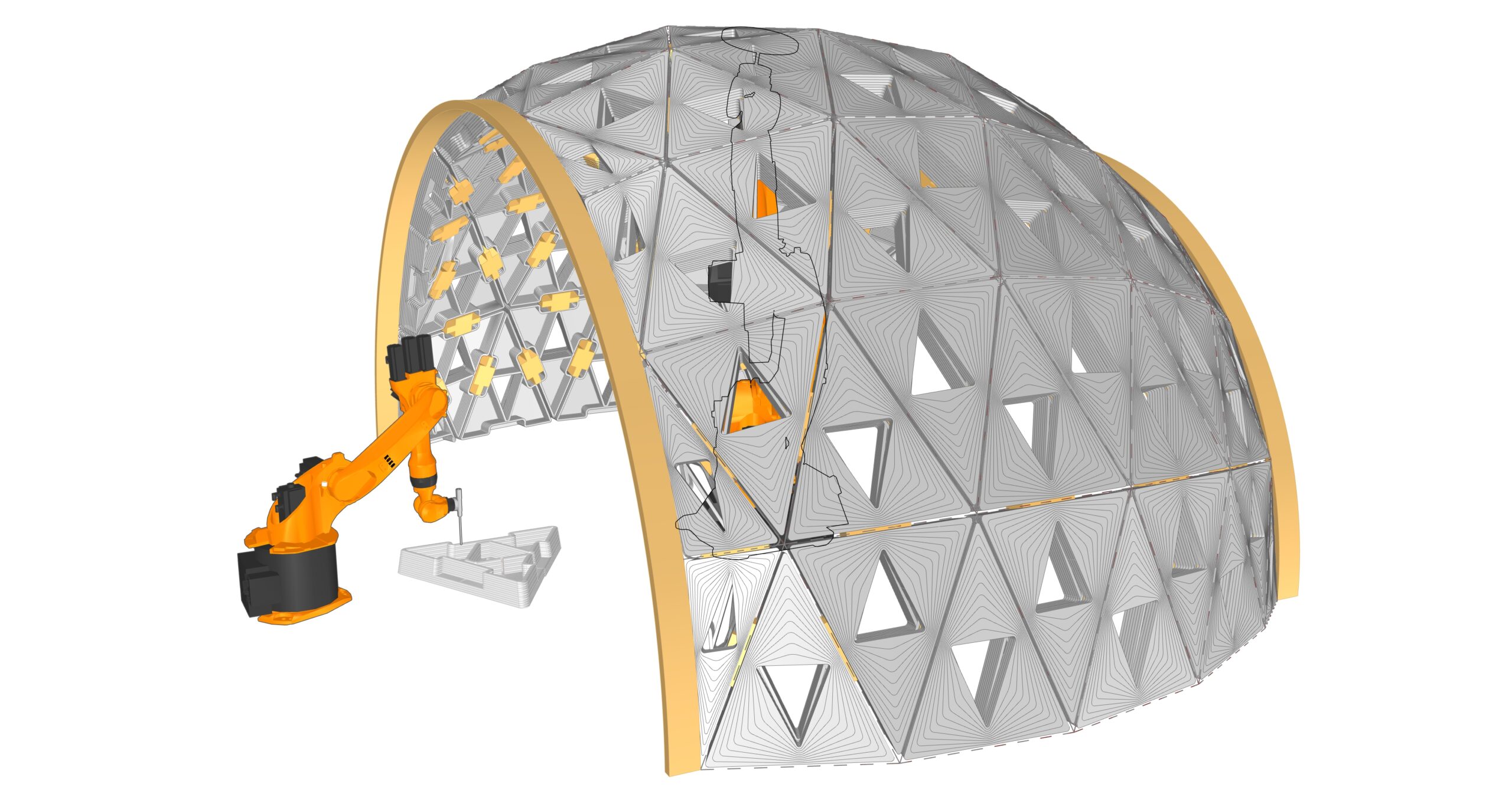
Triangular Unit
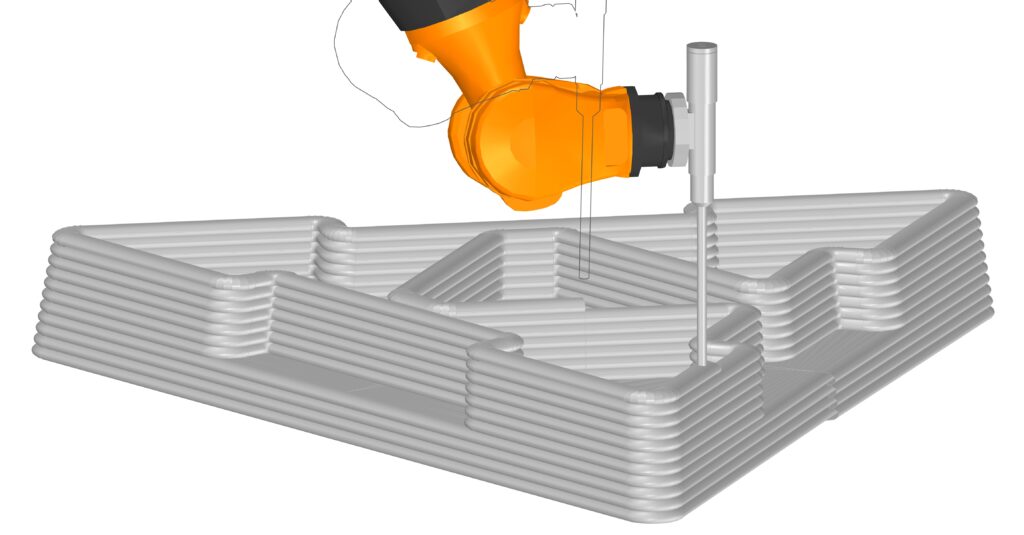
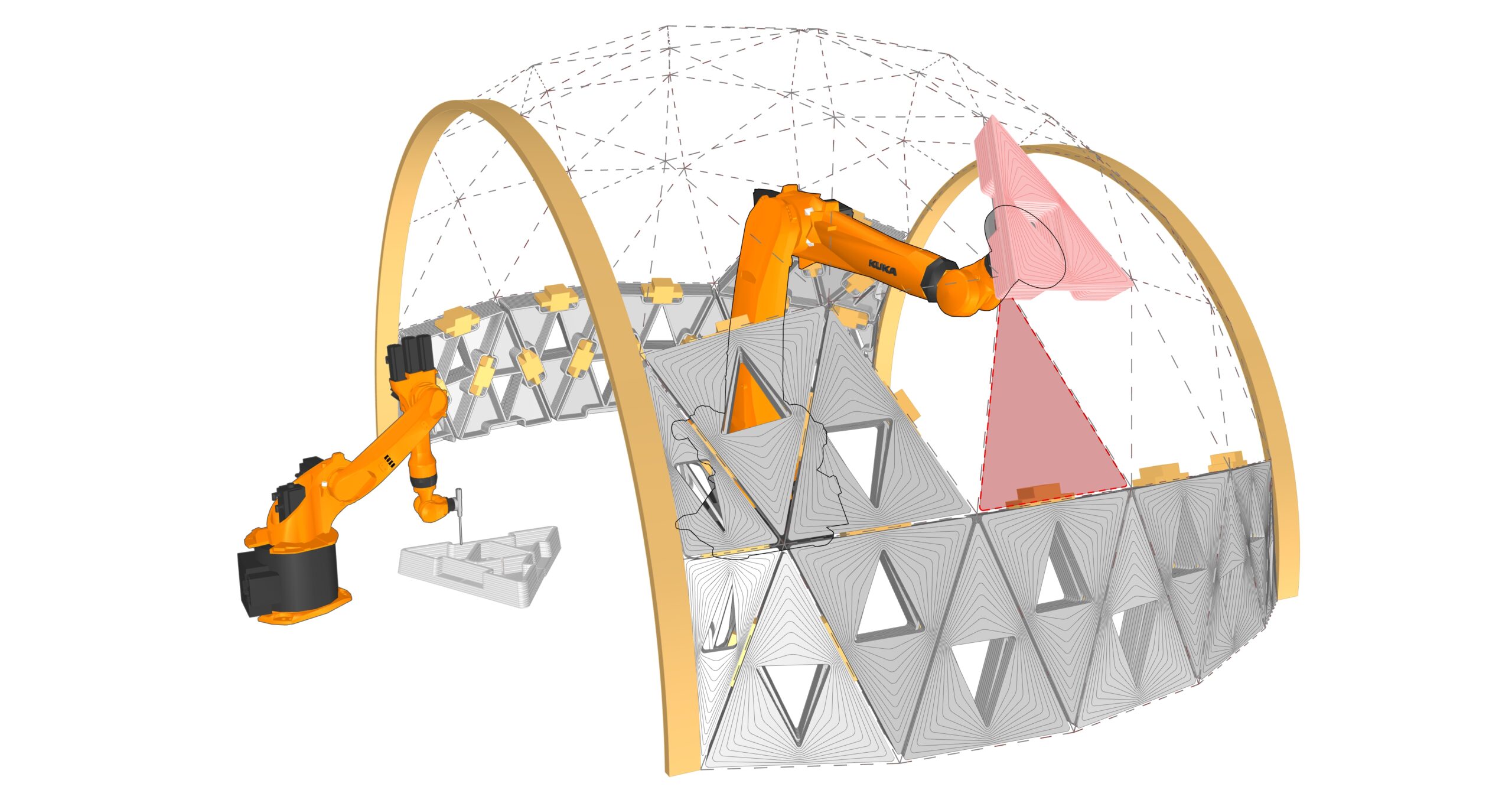
3D Print the Unit with Robotic Arm
Add the Connect Part During Printing
Possibility to Expand
Team: Meng An, Justin Yeung
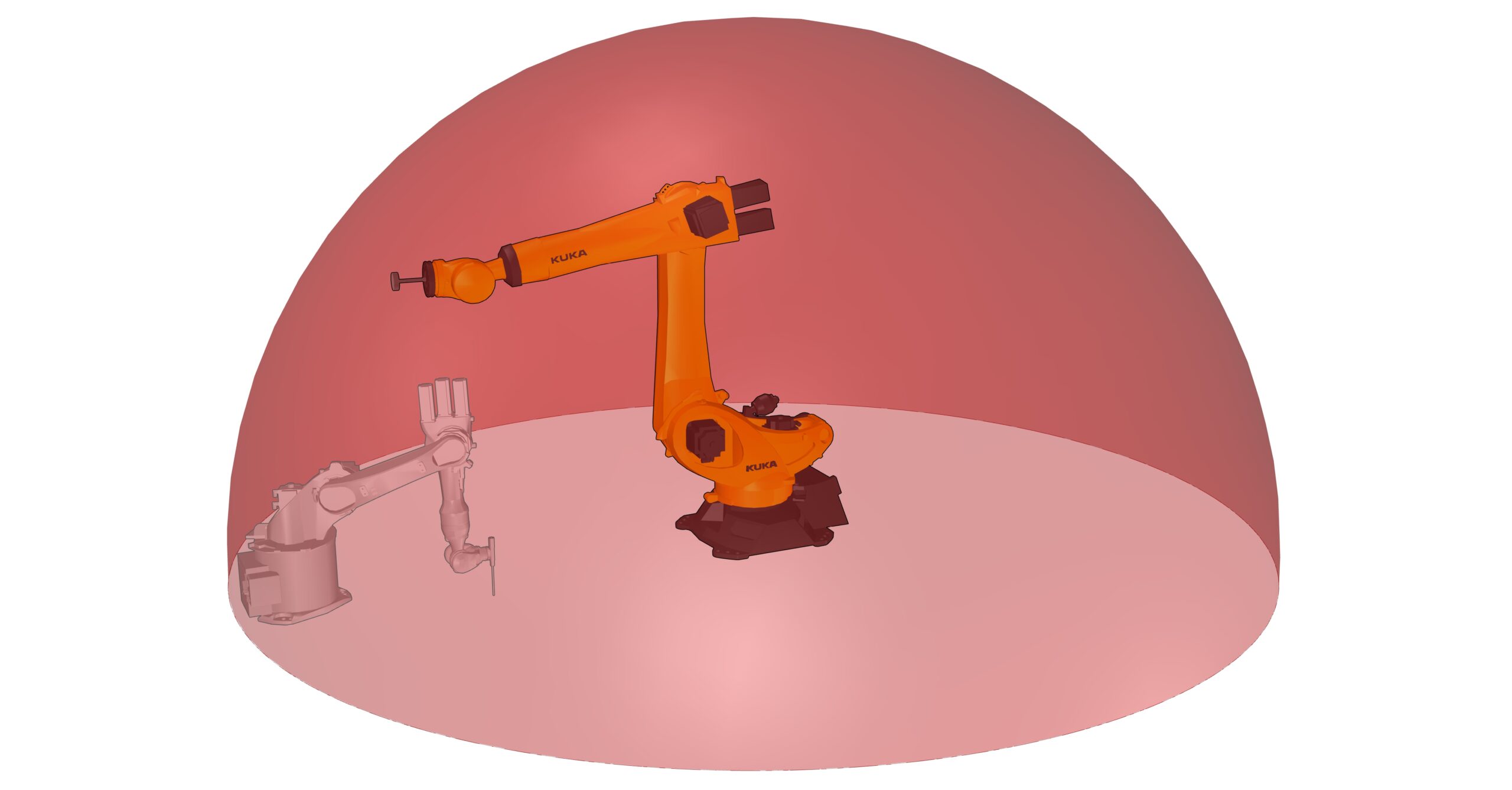
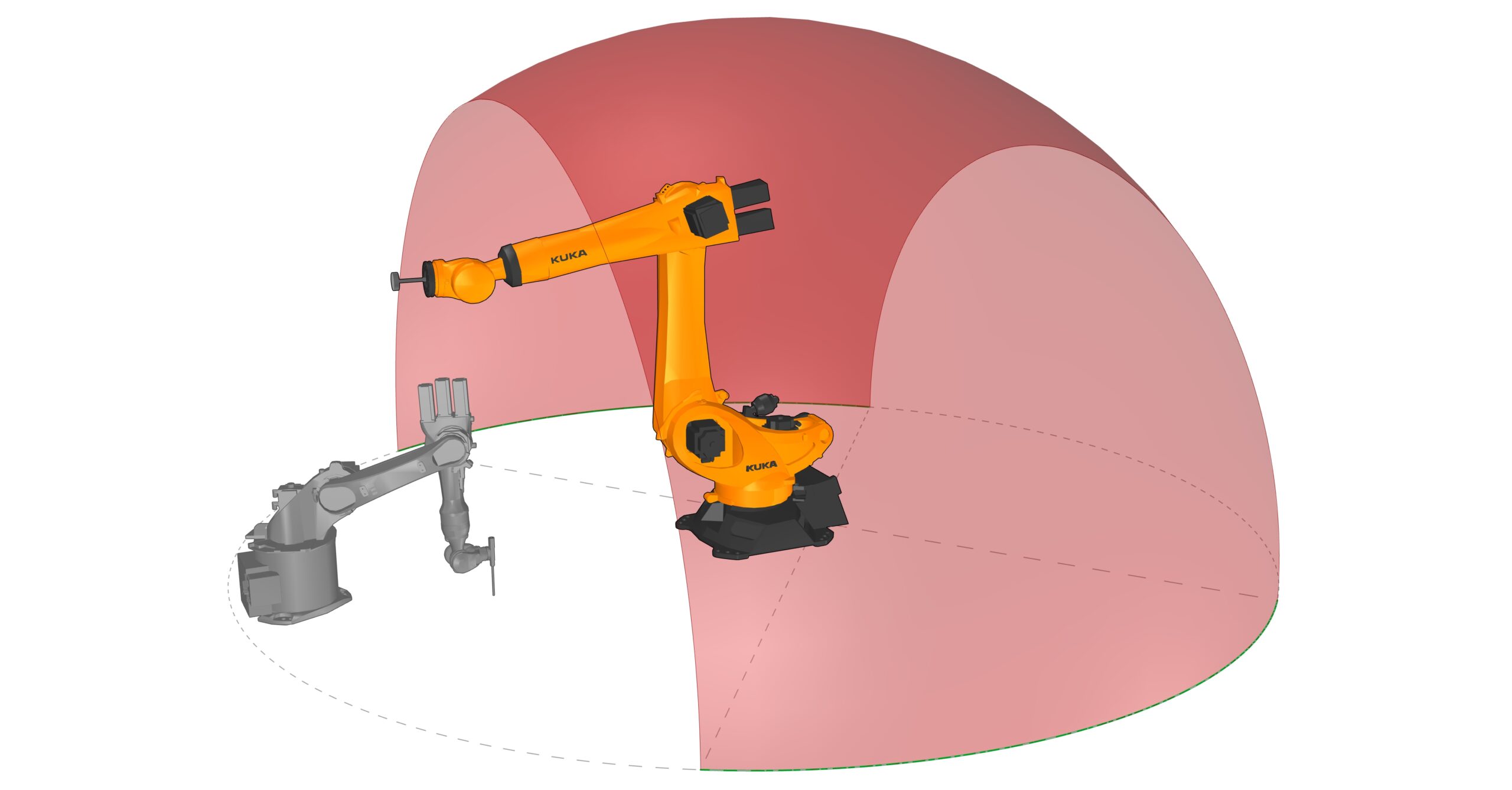
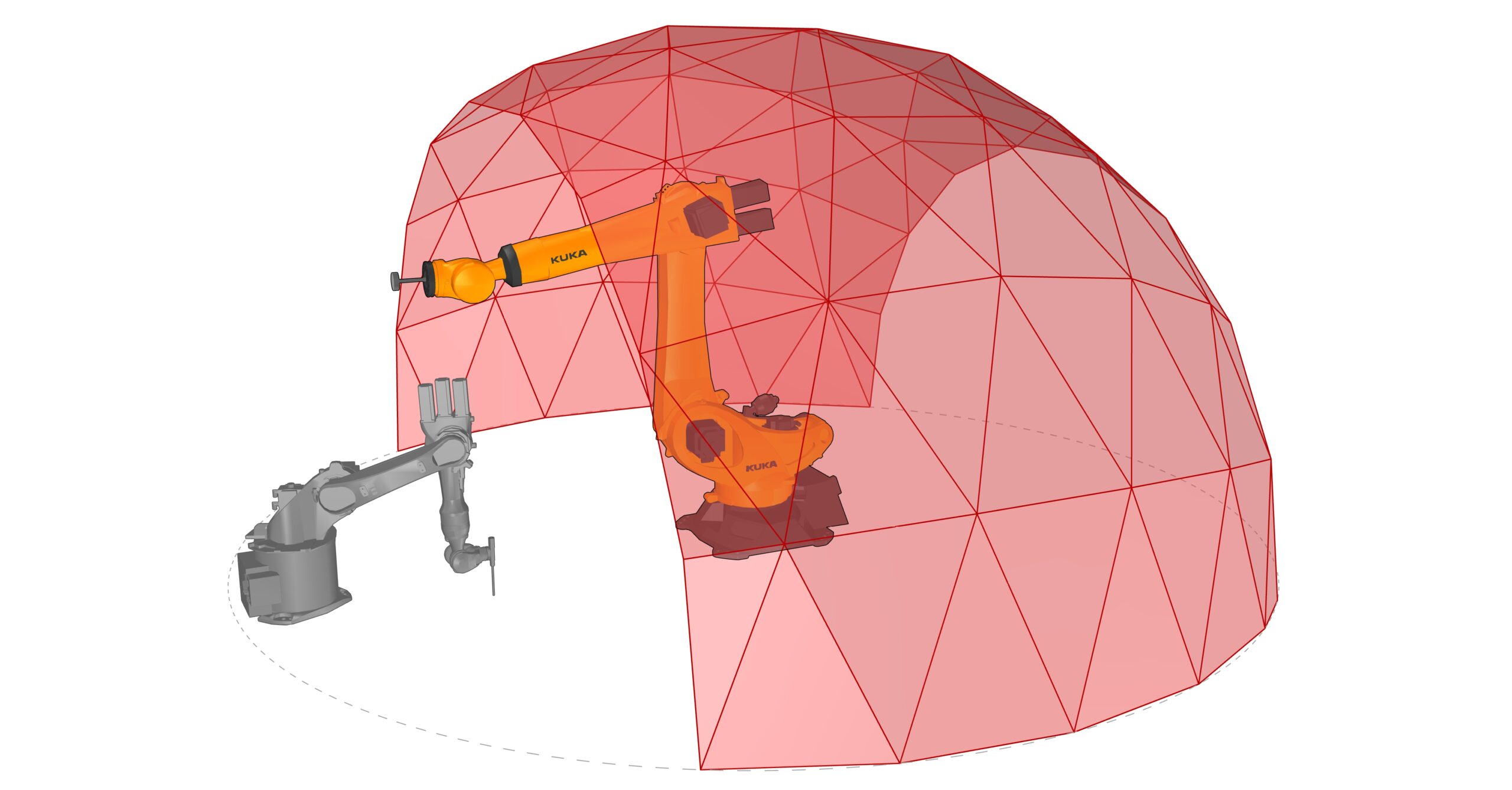
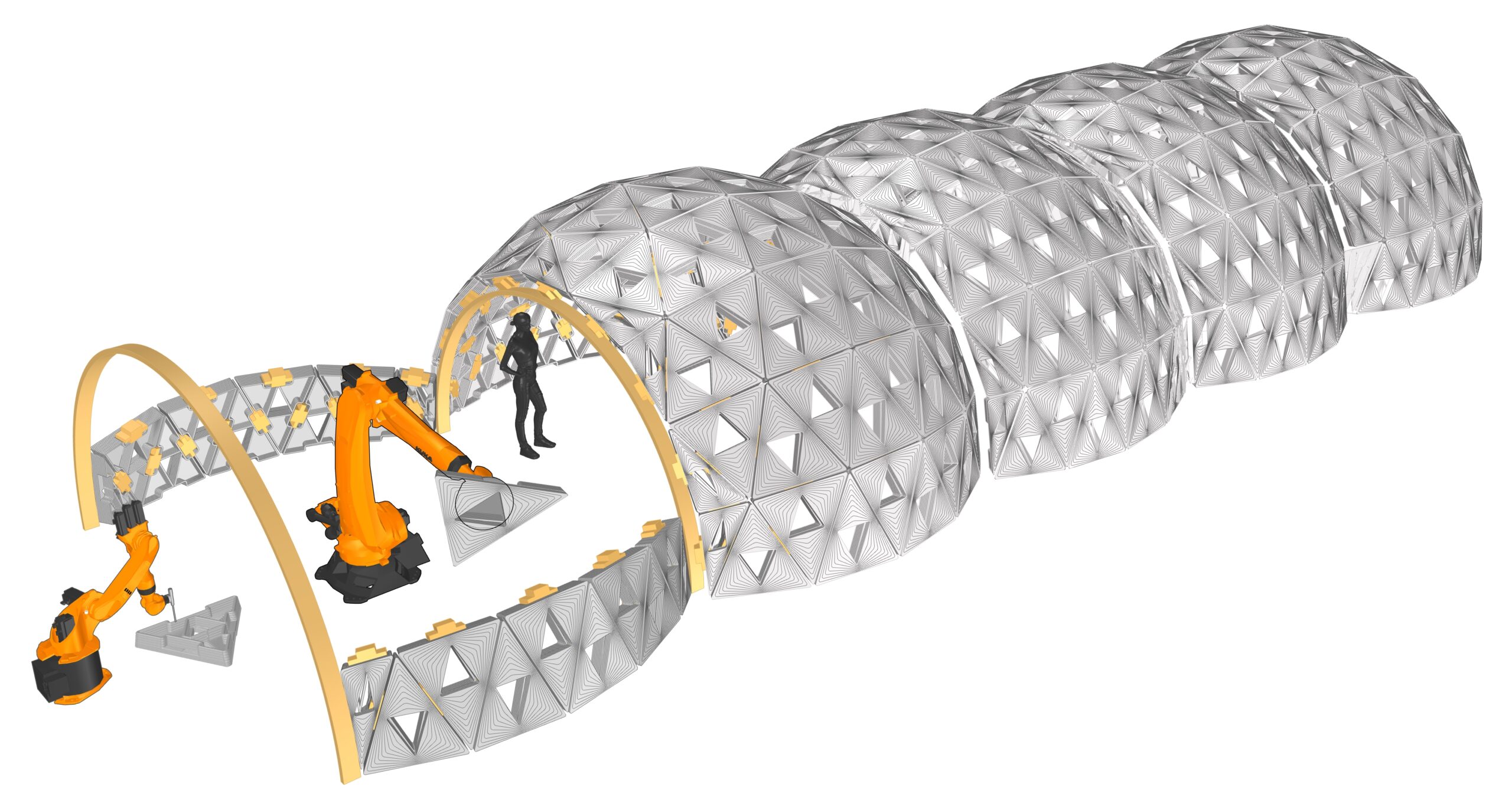
This project investigates the integration of robotic fabrication into architectural construction by developing a dual-arm workflow for 3D-printed concrete structures. The research explores how robotic arms can extend beyond laboratory prototyping and operate directly on site, where one arm is programmed to fabricate modular concrete units through additive manufacturing while the other performs real-time handling, placement, and assembly of the units.
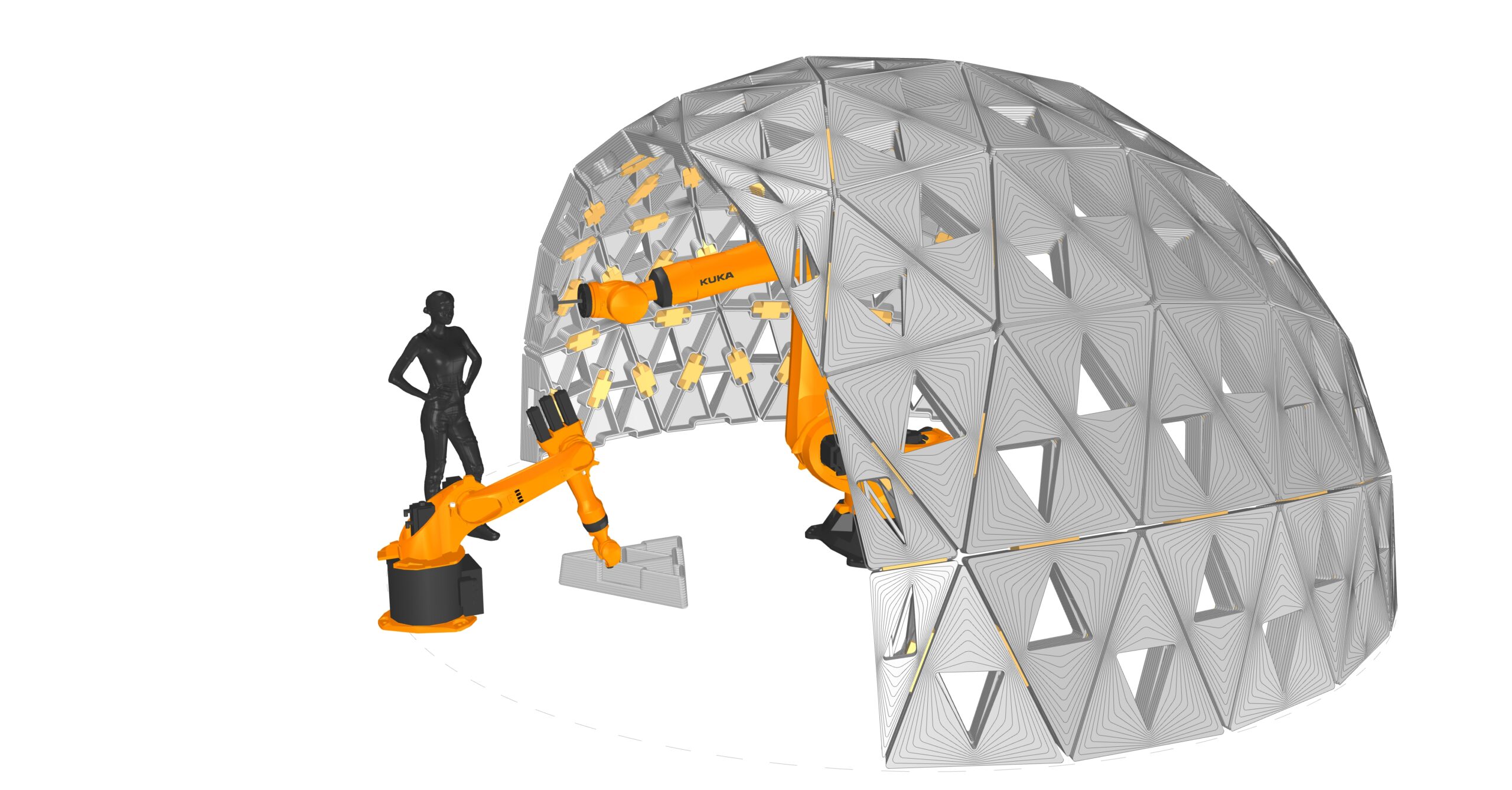
The pavilion serves as a testbed for studying robotic collaboration, modular precision, and adaptive assembly strategies. By decoupling the processes of printing and placement, the system demonstrates a method for parallelizing construction tasks, reducing inefficiencies, and allowing for greater flexibility in form generation. The study also examines how material behavior, unit geometry, and robotic path planning interact to influence structural stability and design outcomes.
Ultimately, the project situates robotic construction as a potential paradigm shift in architecture—moving from manual labor and static prefabrication toward adaptive, automated processes that can respond to the complexities of site, scale, and design intent.